Hi! I’m an engineer and recent graduate of Worcester Polytechnic Institute with a B.S. in mechanical engineering and robotics engineering. I graduated with High Disctinction, which requires consistent academic excellence and a dedication to learning. WPI’s greatest strength is its project-based education, which truly allows the union of theory and practice in engineering. While this site was primarily created to showcase and document my personal projects and skills, I felt that it would only be appropriate that I also highlight some of the work that I’ve accomplished in my project-based college curriculum.
Here is a quick list at a glance. For reference, these are all final projects. “RBE” stands for robotics engineering classes, and “CS” are computer science classes.
Contents:
- Autonomous Roofing Robot (RBE 2001)
- Autonomous Parkour Robot (RBE 2002)
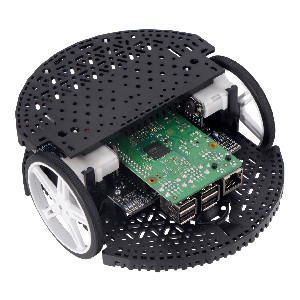
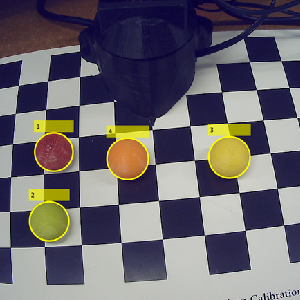
- Autonomous Robotic Ball-Sorter (RBE 3001)
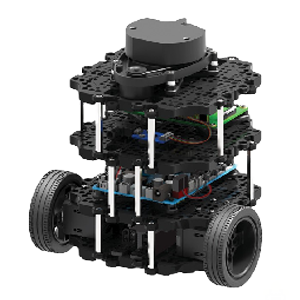
- Autonomous Pathfinding Robot (RBE 3002)
- Full-Stack Hospital Management Application (CS 3733)
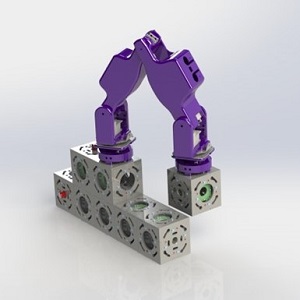
- Symbiotic Multi Agent Construction 3.0 (Senior Capstone)